



脚式ロボット実用化の障害

これらは山や密林、都市などの雑然とした地形でも前進することができ歩兵として大きな役割を果たすと考えられています。
また、こうした地形は無人航空機のちょうどいい隠れ場所となるため、こうした荒れた地形を移動して作戦を補助できる自立型の脚式車両はいずれ必要となります。
過去30年の間に、米軍の科学者たちは、自律走行車の開発を大きく進展させ、多くの課題をクリアさせてきました。
現在車輪やキャタピラを用いた地上車両や、固定翼・回転翼を持つ小型航空車両は、静音性を手に入れ部隊に編成することも可能になってきました。
それでも、脚式車両の実用化には大きなハードルが残されています。
それは脚式車両のエネルギー効率が悪いということです。
「厳しい戦場の中で、そうした兵器が兵士たちと一緒に行動することには限界がある」と、研究チームのチーフを務めるアレキサンダー・コット(Alexander Kott)博士は述べます。
兵士たちは戦場で、大食いの脚式ロボットのために燃料やバッテリーを運搬する余裕はないといいます。
そこで今回の研究チームは、人工的に作られた地上移動システムが、質量、パワー、速度の間に一貫した傾向を示すかどうかを調査しました。
その出発点として、チームは1980年代に発表された、ある質量の動物がある速度で動くために消費する機械的なパワーを見積もるHeglund (ヘグルンド)の公式を調査しました。
そして、その結果を利用して人工的な機械システムに当てはめて比較を行ってみたのです。
彼らの調査は、歴史上の多様な地上移動システムに対して行われました。
それは17世紀のイギリスの大砲から、フォード・モデルT(自動車)、MIエイブラムス(戦車)、アセラ・エクスプレス(列車)まで、実にさまざまなサイズ、形態を研究しました。

その結果、チームは重量が3万5000キログラム未満の場合、さまざまな種類の車両から、わずか1gのゴキブリまで、重量と速度と出力には一貫した関係が当てはまることを発見したのです。
これは意外なことに、車両の移動方式が、脚式、車輪式、キャタピラ式のいずれであっても同じでした。
つまり、移動方式がいずれのプラットフォームであったとしても、すべて同等の効率を持つべきであることが示唆されたのです。
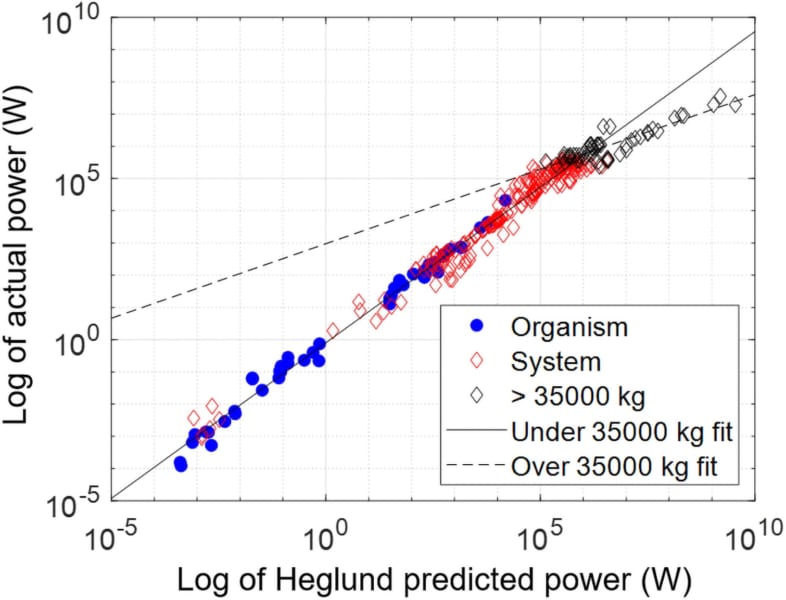
また、約 3万5000 ~ 1億 キログラムの非常に重い車両の場合、出力、質量、速度の関係が異なる領域に入ることもわかりました。
しかし、現在の設計では、脚式ロボットの消費エネルギーは、この公式で予想されるより3~60倍も大きくなっています。
つまり、脚式ロボットは、動物や同等の速度、質量を持つ車輪・キャタピラ式の車両に比べて、大幅に効率が悪いのです。
これが理論値に改善できるかは、現在はまだわかりませんが、システムの設計には複雑な要因が絡むため難しいだろうと考えられています。
これは脚式ロボットが、多様で困難な地形に適応するために支払う必然的な代償なのかもしれません。
なぜ、理論上では車輪もキャタピラも脚式も、動物たちも質量・速度・出力の関係が同一の曲線上に乗るのかという、正確な理由はまだ把握できていません。
しかし、今回の発見は今後の車両兵器開発の設計において、重要な知見になるだろうと研究者は語ります。
「車両開発者が、現実世界のさまざまな制約の中で、あるデザインが現在可能とされる以上のパワーを必要とすると気づいた場合、電源や伝達効率の改善や、車両の質量と速度のスペックを再検討する必要が出てくるでしょう。そのとき今回の成果が役立つことになります」
研究で開発された公式は、陸軍が車両やモーターの重量、希望する速度などの設計上の制約を考慮した上で、脚式ロボットの将来的な性能を予測することを可能にするのです。